

一人ひとりに合わせた手術を
実施できるよう
医師を
サポートします。

What is ROBOT TECHNOLOGY?
人工ひざ関節用
「ロボット支援手術
システム」とは?
NAVIGATION + ROBOTICS
ナビゲーション
システム+ロボット機能
人工ひざ関節用ロボット支援手術システムとは、従来より使用されている人工ひざ関節用ナビゲーションシステムの技術に、計画通り骨を削ることができるように医師をサポートする機能が加えられたものを指します。
「ロボット」というと、一般的には人工知能を搭載したコンピューターが手術を計画・実行するシステムを連想しますが、ロボット支援手術システムはあくまでも手術を正確かつ安全に実施できるよう医師を支援するためのシステムです。


OPTICAL POSE-TRACKING SYSTEM
赤外線を用いた
位置測定システム
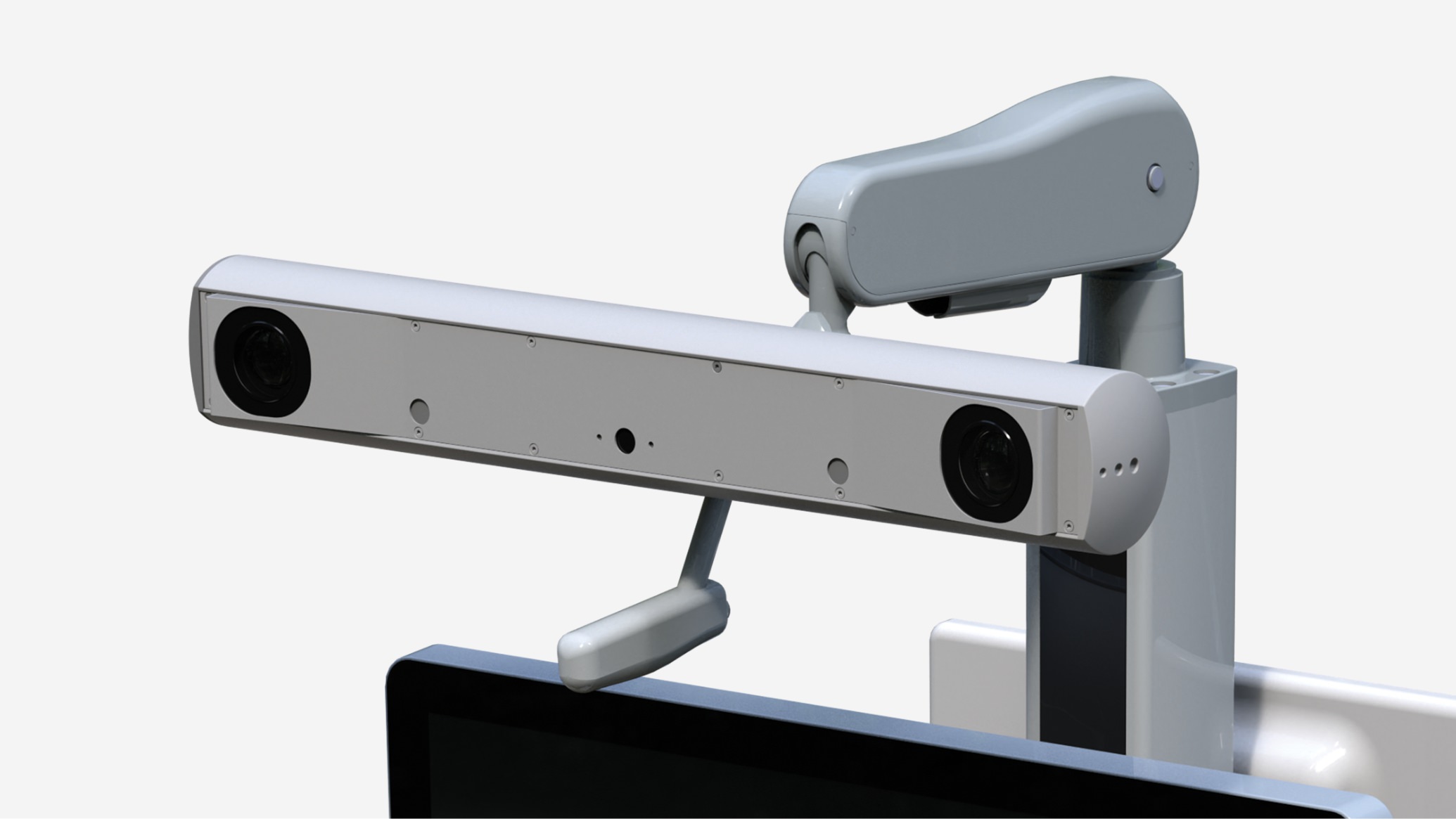
ロボット支援手術システムを使用した手術では、赤外線を発するカメラや赤外線を反射するマーカーを取り付けた器具を用います。手術中は赤外線カメラが常に器具の位置や患者さんの骨、ひざの動きを認識します。カーナビに例えると、赤外線カメラが人工衛星の役割を担い、赤外線反射マーカーの取り付けられた器具(自動車)の位置がどこにあるかをコンピューター画面に表示します。
ROBOTIC-ASSISTED DRILL システムで制御されたドリル


ロボット支援手術システム専用ドリル(ロボティックドリル)で骨を削る際には、ドリルの位置や削る部分がコンピューター画面に表示され、医師を視覚的に誘導する機能があります。また、ドリルの回転数と刃先の位置をシステムが制御しており、あらかじめ計画されている削る位置からドリルが外れるとドリルの回転を止めたり、ドリルを筒状のスリーブに格納したりし、削りすぎることを防ぎます。
WIDESPREAD ADOPTION IN JAPAN 日本国内での普及が加速

近年、ロボット支援手術システムは日本国内への導入が進んでいます。ロボット支援手術システムが医師をサポートすることによって、人工ひざ関節手術がこれまで以上に正確かつ安全に行われることが期待されています。
What are the benefits?
ロボット支援手術
システムの
メリットは?
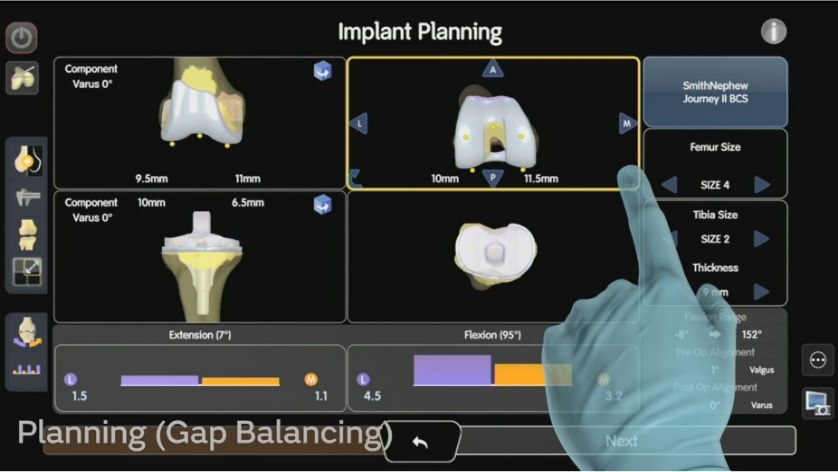
患者さん
一人ひとりに
合わせた手術計画
ロボット支援手術システムは、患者さん一人ひとり異なる骨のかたちやひざまわりの靭帯の状態を数値化し、コンピューター画面に表示することができます。これにより、患者さんのひざに合わせた手術計画を立てることができ、手術後のひざの動きがより改善すると期待されています。

難易度の高い
前十字靭帯を温存した
人工ひざ関節手術
にも対応
近年、前十字靭帯を温存した人工ひざ関節 (ひざ単顆置換術や両十字靭帯温存型ひざ全置換術) への注目が集まっています。これらの手術は術後のひざの動きが良好で患者さんの満足度が高いとされていますが、一方で手術の難易度が高いとされています。ロボット支援手術システムを使用することで、これらの手術も正確で安全に行われることが期待されています。
正確で安全な
手術をサポート
正確で安全な手術をサポート
医師がドリルで骨を削る際、ロボット支援手術システムはコンピューター画面に削る部分を表示したり、計画された部分のみが削れるようドリルを制御します。
これにより正確なインプラント設置が期待でき、人工ひざ関節インプラントがより長持ちすると期待されています。
latest news
ロボット
支援手術システムに
関するニュース
「ロボット技術について」のページをリニューアルしました。
日本医療学会の対談シリーズ「第九回 人工関節置換術の最前線」にて、ロボット支援手術システムが取り上げられました。(動画中27:22よりロボット支援手術システムについて語られています)
hospital search
ロボット支援手術
システムを
導入している
病院を探す

